
OMG !!!  Wow that second vid of the Hexapod suddenly dropping at the end was scary ... poor Coops looked bit shocked at the end !
Wow that second vid of the Hexapod suddenly dropping at the end was scary ... poor Coops looked bit shocked at the end !
Anyway, thanks for the detailed info in your reply Thanos ... I do not have an E-Stop connected and as far as can tell the servo's are never overloaded. I had a UPS and it died awhile ago but might have to look into one again.
My PT's are the 250mm/sec but I would say it did not feel like they dropped slowly as it crashed to ground fast and hard with me in the rig. But you said it should have parked itself the 2 times that the PC crashed because I cannot recall power being completely cut except for when there was a power outage.
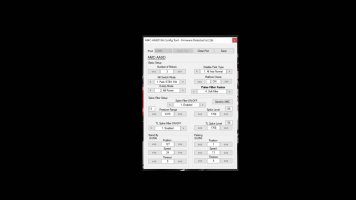
Have I incorrectly adjusted settings in the AMC-AASD15A ?
Wow that second vid of the Hexapod suddenly dropping at the end was scary ... poor Coops looked bit shocked at the end !Anyway, thanks for the detailed info in your reply Thanos ... I do not have an E-Stop connected and as far as can tell the servo's are never overloaded. I had a UPS and it died awhile ago but might have to look into one again.
My PT's are the 250mm/sec but I would say it did not feel like they dropped slowly as it crashed to ground fast and hard with me in the rig. But you said it should have parked itself the 2 times that the PC crashed because I cannot recall power being completely cut except for when there was a power outage.
Have I incorrectly adjusted settings in the AMC-AASD15A ?
Attachments
Last edited:


















